本篇目录:
- 1、什么是CAN总线协议
- 2、can总线协议定义的介质访问控制方式有什么特点
- 3、我想问问CAN光端机设备支持的CAN总线协议类型有哪几种呢?
- 4、制定CAN总线链路层协议都需要做什么
- 5、汽车can线协议?
- 6、CAN总线协议的协议内容
什么是CAN总线协议
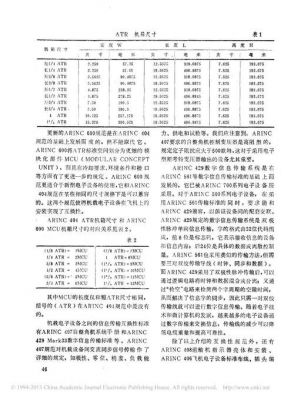
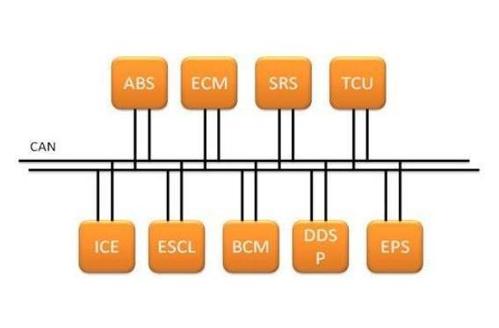
1、控制器局域网CAN( Controller Area Network)属于现场总线的范畴,是一种有效支持分布式控制系统的串行通信网络。是由德国博世公司在20世纪80年代专门为汽车行业开发的一种串行通信总线。
2、CAN是控制器局域网络的简称,是ISO国际标准化的串行通信协议。它的英文全称是Controller Area Network,一般简写为CAN。
-图1")
3、CAN(Controller Area Network)总线协议是目前使用最广泛的汽车电子控制系统通讯协议,它是一种高速串行总线,仅使用两根信号线进行数据传输。
4、can是两根线,2can线上有两个状态,a隐性状态,两线电压5V,表示位为1。
can总线协议定义的介质访问控制方式有什么特点
介质访问控制方式,也就是信道访问控制方法,可以简单的把它理解为如何控制网络节点何时发送数据、如何传输数据以及怎样在介质上接收数据。
-图2")
CAN总线的特点:具有实时性强、传输距离较远、抗电磁干扰能力强、成本低等优点。采用双线串行通信方式,检错能力强,可在高噪声干扰环境中工作。
CAN总线协议具有下面的特点:1) 多主控制 当总线空闲时,连接到总线上的所有单元都可以启动发送信息,这就是所谓的多主控制的概念。先占有总线的设备获得在总线上进行发送信息的资格。
我想问问CAN光端机设备支持的CAN总线协议类型有哪几种呢?
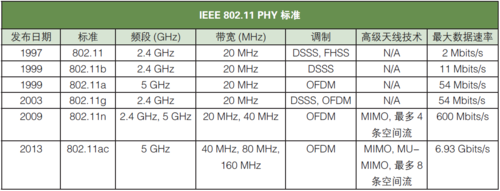
一般我们常用的CAN总线协议有三种,分别是CANopen,device net和J 1939,它们的侧重点是不同的,具体的大家可以去百度百科分别查询,希望我的回答令您满意。
-图3")
can总线的分类有CAN、CANopen、DeviceNet三种类型。CAN是控制器局域网络(ControllerAreaNetwork,CAN)的简称。CAN是ISO国际标准化的串行通信协议。
CAN总线的工作原理CAN总线使用串行数据传输方式,可以1Mb/s的速率在40m的双绞线上运行,也可以使用光缆连接,而且在这种总线上总线协议支持多主控制器。 CAN与I2C总线的许多细节很类似,但也有一些明显的区别。
CAN协议是CAN总线的运行规则,不同汽车上CAN总线的协议类型是不同的。比如说发动机为汽油机的汽车,它一般就采用ISO 15765作为总线协议。烧柴油的机动车呢?它们一般采用J 1939协议。
制定CAN总线链路层协议都需要做什么
1、设计一个CAN系统时,物理层具有很大的选择余地,但必须保证CAN协议中媒体访问层非破坏性位仲裁的要求,即出现总线竞争时,具有较高优先权的报文获取总线竞争的原则,所以要求物理层必须支持CAN总线中隐性位和显性位的状态特征。
2、这减少了协议开销,并提高了协议效率。 增加传输的速度 CAN FD支持双比特率:与传统CAN一样,标称(仲裁)比特率限制为1 Mbit/s,而数据比特率则取决于网络拓扑/收发器。实际上,可以实现高达5 Mbit/s的数据比特率。
3、CAN总线的工作原理CAN总线使用串行数据传输方式,可以1Mb/s的速率在40m的双绞线上运行,也可以使用光缆连接,而且在这种总线上总线协议支持多主控制器。 CAN与I2C总线的许多细节很类似,但也有一些明显的区别。
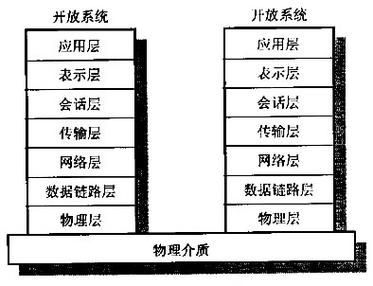
4、基于以下几条基本规则进行通信协调:总线访问、仲裁、编码/解码、出错标注和超裁标注。CAN遵从OSI模型。按照OSI基准模型只有三层:物理层、数据链路层和哀告层,但应用层尚需用户自己定义。
汽车can线协议?
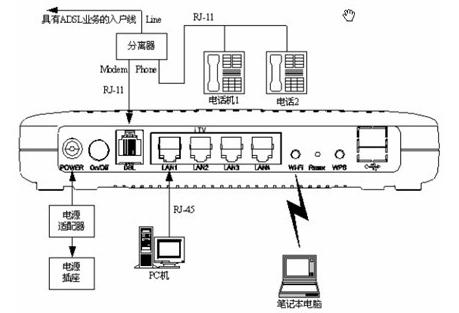
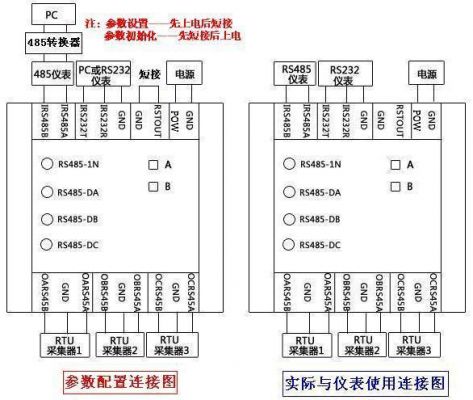
1、现在解析汽车CAN协议的办法主要为控制变量法。首先,我们要确保汽车CAN数据能够被引导出来,也就是汽车的OBD处没有被设置障碍,可以实现正常的数据收发。然后,我们将USBCAN与汽车CAN线以及装有收发软件的电脑分别连接。
2、BOSCH CAN基本上没有对物理层进行定义,但基于CAN的ISO标准对物理层进行了定义。
3、具有优先权和仲裁功能,多个控制模块通过CAN 控制器挂到CAN-bus上,形成多主机局部网络。可根据报文的ID决定接收或屏蔽该报文。可靠的错误处理和检错机制。发送的信息遭到破坏后,可自动重发。
4、CAN 是Controller Area Network 的缩写(以下称为CAN),是ISO国际标准化的串行通信协议。在汽车产业中,出于对安全性、舒适性、方便性、低公害、低成本的要求,各种各样的电子控制系统被开发了出来。
5、CAN 是Controller Area Network 的缩写(以下称为CAN),是ISO国际标准化的串行通信协议。在汽车产业中,出于对安全性、舒适性、方便性、低公害、低成本的要求,各种各样的电子控制系统被开发了出来。
CAN总线协议的协议内容
具有实时性强、传输距离较远、抗电磁干扰能力强、成本低等优点。采用双线串行通信方式,检错能力强,可在高噪声干扰环境中工作。
设计一个CAN系统时,物理层具有很大的选择余地,但必须保证CAN协议中媒体访问层非破坏性位仲裁的要求,即出现总线竞争时,具有较高优先权的报文获取总线竞争的原则,所以要求物理层必须支持CAN总线中隐性位和显性位的状态特征。
CAN线协议的主要优点是高速数据传输,数据传输准确性高,抗噪性好,可靠性和可扩展性强。
CAN协议,即控制器局域网总线(CAN,Controller Area Network),是一种用于实时应用的串行通讯协议总线,它可以使用双绞线来传输信号,是世界上应用最广泛的现场总线之一。
到此,以上就是小编对于can总线协议的网络采用什么拓扑结构的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏