本篇目录:
车机技术之CAN、CAN-bus
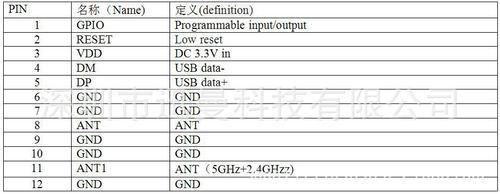
1、CAN控制器根据两根线上的电位差来判断总线电平。总线电平分为显性电平和隐性电平,二者必居其一。发送方通过使总线电平发生变化,将消息发送给接收方。
2、CAN-BUS即CAN总线技术,全称为控制器局域网总线技术。Can-Bus总线技术最早被用于飞机等武器电子系统的通讯联络上。将这种技术用于民用汽车最早起源于欧洲,在汽车上这种总线网络用于车上各种传感器数据的传递。
-图1")
3、Can-Bus总线技术是“控制器局域网总线技术”的简称,它具有极强的抗干扰和纠错能力,最早被用于飞机、坦克等武器电子系统的通讯联络上。
4、Can-Bus总线技术是“控制器局域网总线技术(ControllerAreaNetwork-BUS)”的简称,在汽车中,该总线网络用于汽车各种传感器数据的传输,实现数据共享。
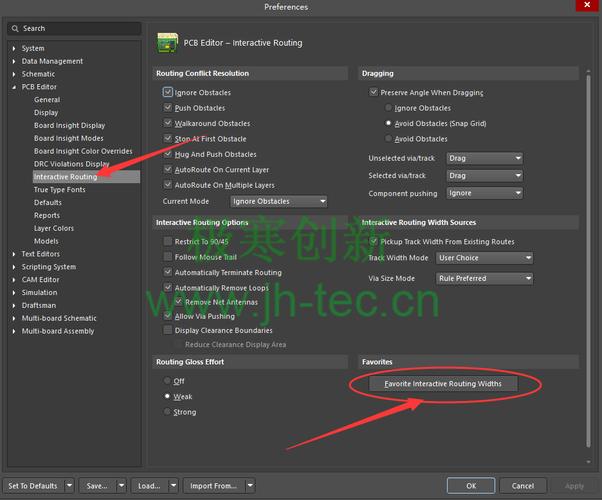
5、什么是CANBUS啊?希望有具体的回答 解析:很早的时间,专家们就把电子技术实现在车用比做汽车的一场革命。那么我认为CANBUS总线的出现就是汽车的又一场革命。
-图2")
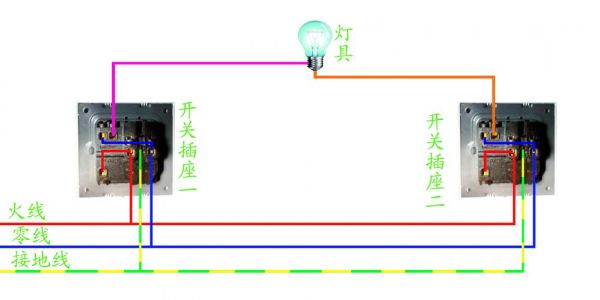
6、can总线是我们车辆上进行通讯的数据线,以前的汽车一个传感器产生的信号就供给一个控制单元,而现在汽车上一个传感器产生的信号多个控制单元要使用为了减少我们的线束。
汽车多路CAN线是怎么回事
CAN是一种多主方式的串行通讯总线,基本设计规范要求有高的位速率,高抗电磁干扰性,而且能够检测出产生的任何错误。当信号传输距离达到10Km时,CAN 仍可提供高达50Kbit/s的数据传输速率。
随着车用电子化自动化的提高,ECU将会日益增多,线路会日益复杂。为了简化电路和降低成本,车上多个ECU之间的信息传递就要采用一种称为多路复用通信网络技术,将整车的ECU形成一个网络系统,也就是CAN数据总线。
-图3")
CAN总线:(ControllerAreaNetwork,CAN)即控制器局域网络,是由以研发和生产汽车电子产品著称的德国BOSCH公司开发的,并最终成为国际标准(ISO11898),是国际上应用最广泛的现场总线之一。
CAN2.0协议规范(精)
年9月,Philips半导体公司制定并发布CAN技术规范:CAN0A/B。1993年11月,ISO组织正式颁布CAN国际标准ISO11898。CAN-bus是唯一成为国际标准的现场总线,也是国际上应用最广泛的现场总线之一。
从CAN_H、CAN_L直接拉线连接到自己的CAN_H、CAN_L就可以,不过分支不能太长。阻抗匹配,在任意两个节点或者在总线两端分别接一个120欧的终端电阻就行了。
CAN(Controller Area Network)是一种串行通信协议,用于在汽车、工业控制系统和其他设备之间传输数据。CAN 通信的数据传输速率不同,主要是因为不同的标准使用了不同的帧结构和信息编码方式,从而导致了不同的数据传输速率。
CAN协议,即控制器局域网总线(CAN,Controller Area Network),是一种用于实时应用的串行通讯协议总线,它可以使用双绞线来传输信号,是世界上应用最广泛的现场总线之一。
CAN(Controller Area Network)是一种广泛应用于汽车电子和其他工业系统中的通信协议。CAN 0A和CAN 0B是CAN协议的两个不同版本,它们有一些细微的差异。
英博尔CAN引用标准:SAE J1939-21。物理接口:采用CAN0B标准,通讯波特率为250kbps,数据中未使用或者保留的字节约定为0x00。
到此,以上就是小编对于can的应用有哪些的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏