本篇目录:
- 1、机器人微小误差的多关节修正原理
- 2、用伺服电机控制长度,移动的距离误差很大怎么回事
- 3、猎杀潜航3损管和鱼雷问题,急!
- 4、电流互感器的误差产生的原因是什么,如何减少误差?
- 5、1误差的概念
- 6、步进电机所转的角度有所偏差,是什么原因造成的?
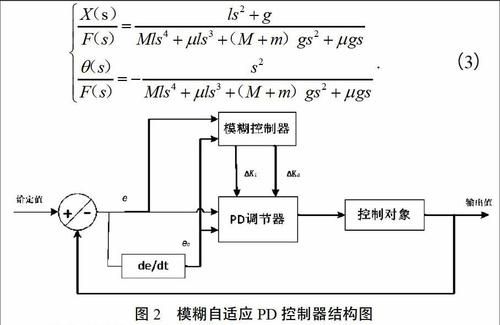
机器人微小误差的多关节修正原理
它原理是,由汽油机驱动的液压系统能够带动其有关节的四肢运动。陀螺仪和其他传感器帮助机载计算机规划每一步的运动。机器通过四 条腿来保持身体的平衡,每条腿有三个靠传动装置提供动力的关节,并有一个“弹性”关节。
关节是机器人最重要的基础部件之一,也是运动的核心部件:精密减速机。这是一种精密的动力传达机构,其利用齿轮的速度转换器,将电机的回转数减速到所要的回转数,并得到较大转矩的装置,从而降低转速,增加转矩。
-图1")
这些误差可能是由于机器人与工件的精确位置、机器人的姿态、工具的大小、轨迹规划算法等因素引起的。为了确保机器人能够准确地执行轨迹,需要对ROBOGUIDE中的轨迹程序进行修正。
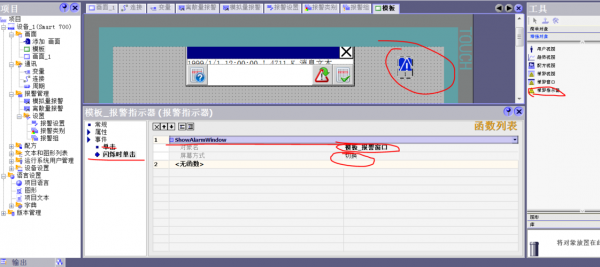
用伺服电机控制长度,移动的距离误差很大怎么回事
首先一定要根据编码器线数把脉冲当量算准,否则就会出现累积误差。其次,位置环增益不能太小,定位允差不要太大。再有就是机械误差了。
参数设置是否OK?比方说电子齿轮比等参数。另外,伺服发送的脉冲与收到的脉冲是否正确,数值是否相同。这个可以通过伺服软件在电脑上进行监控。
-图2")
在电机轴上加上一个光电旋转编码器测量其转过的圈数,然后再软件里面用该数值修正即可。
有几十丝那就不是误差了,先要确定是不是干扰造成的数据丢失,先确定你PLC发出了多少个脉冲,而后再到伺服驱动器里监控接收了多少个脉冲。
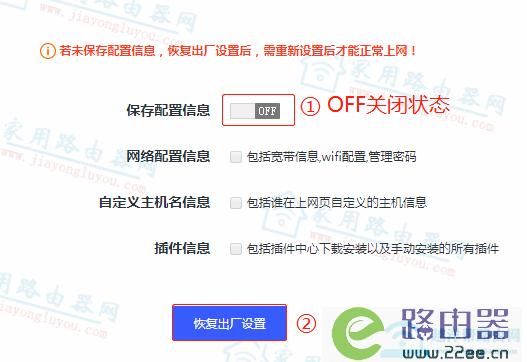
猎杀潜航3损管和鱼雷问题,急!
1、船只遭到鱼雷攻击后,不会马上就沉的,要过一会儿,这个时间要看你击中的是商船的什么部位,如果是中间的锅炉舱就会快一点,如果是货舱就要慢一些。
-图3")
2、先用潜望镜对准船的中间位置,然后点击旁边的黑色按钮,就锁定了。
3、鱼雷命中船底弹掉,不炸,这是游戏尊重历史的现象,不是游戏本身的问题,如果你不想这样真实性,可以在游戏选项里选择关闭哑雷,这样你的鱼雷就百分百炸响了。
4、)、要保证你在水面状态,这样才可以移动潜艇外部储备鱼雷。
电流互感器的误差产生的原因是什么,如何减少误差?
1、电流互感器的误差产生的原因: ⑴ 电流互感器的误差是由铁芯的结构和材料的性能决定的,即与磁路长度、铁芯截面和导磁率有关,与线圈的匝数和电阻、二次负载的大小和负载功率因数角有关。
2、互感器的工作原理也是电磁感应,在这个转换过程中有一部分能量要消耗在励磁上,因这个引起的误差是无法消除的。在使用中应该选择与系统电压等级相同,变比适当,饱合倍数也应该满足系统要求的互感器。
3、在二次侧安装断路器可以使电流互感器在运行过程中更加安全可靠,因此断路器的选择必须适当。为避免开三角绕组两侧电压不平衡,需要在开三角绕组两侧做并联电阻,当并联电阻感应到零序电压时,接通零序电流到设备。
1误差的概念
误差的概念是测量值与真值之间的差值。误差按其性质和产生原因,可分为系统误差、随机误差和过失误差。系统误差:又称可测误差、恒定误差或偏倚。
误差是指测量值与真实值之间的差异。 由于仪器、实验条件、环境等因素的限制,测量不可能无限精确,物理量的测量值与客观存在的真实值之间总会存在着一定的差异,这种差异就是测量误差。误差是不可避免的,只能减小。
误差 ,随 量化精度 和位数提高而减少,不可能消除。
误差的词语解释是:误差wùchā。(1)一个量的观测值或计算值与其真值之差;特指统计误差,即一个量在测量、计算或观察过程中由于某些错误或通常由于某些不可控制的因素的影响而造成的变化偏离标准值或规定值的数量。
误差是测量测得的量值减去参考量值。测得的量值简称测得值,代表测量结果的量值。所谓参考量值,一般由量的真值或约定量值来表示。
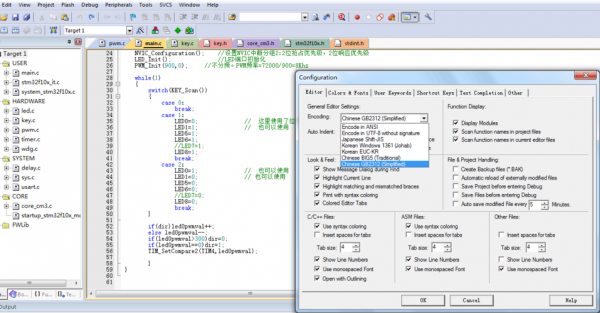
步进电机所转的角度有所偏差,是什么原因造成的?
步进电机步进不准是由于控制步进电机移动的步进脉冲的时序不准确所导致的,可检查步进脉冲的生成与时序控制电路部分。
高速运转中电压不稳,使输入电流有时达不到额定电流,而造成输出扭矩下降,最终导至失步。转速设置过高,力矩不够。外部阻力过大。速度上升或下降过快,而造成失步。
刚开始看 也纳闷怎会丢步 仔细一看 你有个1:16的减速比 那肯定是你减速机的齿隙造成的精度偏差了。没有别的解释。步进电机的度数精度 已经很高了。除非是丢步(丢脉冲)。
步进电机老是一个角度来回摆动可能的原因是: 驱动频率细分设置不对; 驱动加速度设置不对;负载太大。步进电机驱动器是一种将电脉冲转化为角位移的执行机构。
到此,以上就是小编对于电气角误差怎么修正视频的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏