本篇目录:
- 1、用单片机模拟UART通信是全双工还是半双工?
- 2、MCS-51系列单片机有几个并行I/O口几个全双工串口,几个16位定时器几个...
- 3、MCS-51单片机什么是全双工,半双工,单工串行通信?
- 4、一般焊接应用,机器人常使用哪种类型的标准io板卡?
用单片机模拟UART通信是全双工还是半双工?
1、串口通信属于 串行 异步 半双工 的通信模式 最近在调试一个IO模拟UART的程序,把调试过程中遇到的问题总结一下。对于UART的发送部分(主机模式)还是比较容易实现的。
2、单片机串口通信是全双工的,发送和接受可以同时进行。不可以同时进行的是半双工。
-图1")
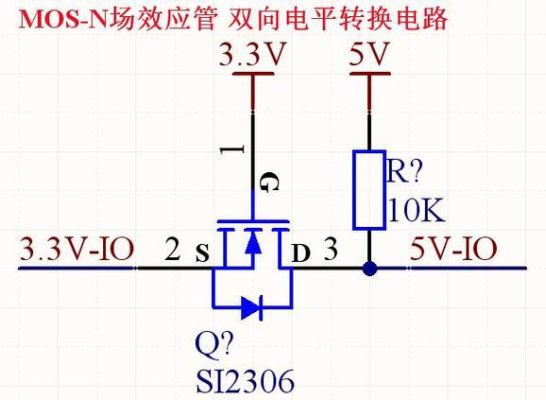
3、而且是半双工的通讯方式,需要个转换芯片,例如max485 RX接MAX485的DO TX接DI 还要个IO口控制收发引脚,然后把主机和从机的AB线对应连接就行了。具体的你可以找个数据手册看看,很简单的。
4、单片机的串行口是一个可编程全双工的通信接口,具有UART(通用异步收发器)的全部功能。
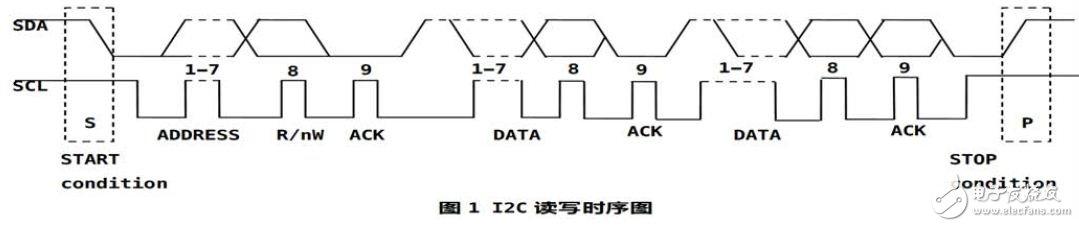
5、单片机内部有一个全双工串行接口。什么叫全双工串口呢?一般来说,只能接受或只能发送的称为单工串行;既可接收又可发送,但不能同时进行的称为半双工;能同时接收和发送的串行口称为全双工串行口。
-图2")
MCS-51系列单片机有几个并行I/O口几个全双工串口,几个16位定时器几个...
目前来说,这个系列的并行接口的话有五个那么其中三个是计时器两个是中断的。
·两个 16位定时器/计数器;·可寻址 64K外部数据存储器和 64K外部程序存储器空间的控制电路;·32条可编程的I/O线(四个6位并行I/O端口)·一个可编程全双工串行口;·具有五个中断源、两个优先级嵌套中断结构。
mcs-51单片机的4 个口都 可作为io口使用,除p1口外,其它三个i/o口都有第二功能。p0口可作为数据总线口,它可以对外部存储器低8 位读写。p2口也可以作为系统 扩展时的高8 位地址。
-图3")
MCS_51单片机 集成有4个并行I/O口,即P0、P1 、P2 、P3。
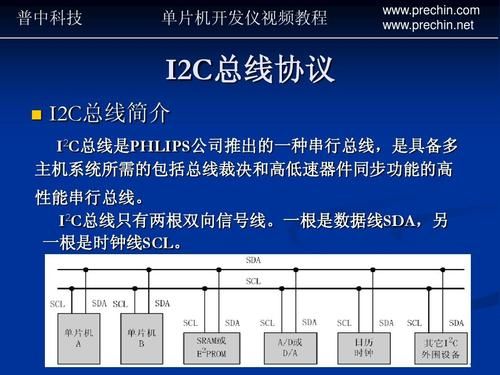
并行I/O口 MCS-51共有4个8位的I/O口(P0、PPP3)以实现数据的输入输出。具体功能在后面章节中将会详细论述。串行口 MCS-51有一个可编程的全双工的串行口,以实现单片机和其它设备之间的串行数据传送。
MCS-51单片机什么是全双工,半双工,单工串行通信?
单工只有一根数据线,信息只能单向传送。半双工也只有一根数据线,但信息可以分时双向传送。全双工有两根数据线,可以同时双向传送。半双工可以在一个信号载体的两个方向上传输,但是不能同时传输。
单片机内部有一个全双工串行接口。什么叫全双工串口呢?一般来说,只能接受或只能发送的称为单工串行;既可接收又可发送,但不能同时进行的称为半双工;能同时接收和发送的串行口称为全双工串行口。
的串口是全双工的。就是在发的同时可以收,收的同时也可以发。单工就是只能收或只能发,双工就是既能收又能发。双工还包括半双工和全双工。半双工指在收的时候不能发,发的时候不能收。
特点:在这种工作方式下,发送端可以转变为接收端;相应地,接收端也可以转变为发送端。但是在同一个时刻,信息只能在一个方向上传输。因此,也可以将半双工通信理解为一种切换方向的单工通信。
单工 单工就是指终端A只能发信号,而终端B只能接收信号,通信是单向的。半双工 半双工就是指终端A能发信号给终端B,终端B也能发信号给终端A,但是,这两个过程不能同时进行。
特点:该方式可将发送端转换为接收端;相应地,接收端也可以转换为发送端。但与此同时,信息只能向一个方向传输。因此,半双工通信也可以理解为定向开关单工通信。
一般焊接应用,机器人常使用哪种类型的标准io板卡?
IO板卡J1和J2广泛应用于各种领域,如:工业自动化:IO板卡J1和J2可用于控制工业机器人、自动化生产线等设备。安防监控:IO板卡J1和J2可用于连接摄像头、监视器等设备,实现视频监控和远程控制。
轴类焊接机器人工作站是专门针对低压电器行业中万能式断路器中的转轴焊接开发的专用设备,推出了一套专用的转轴焊接机器人工作站。
焊接机器人按执行机构运动的控制机能,可分点位型和连续轨迹型。焊接机器人按程序输入方式区分有编程输入型和示教输入型两类。焊接机器人按臂部的运动形式分为四种。
电子设备行业。电子设备行业追求的事精确度和稳定性,焊缝自动跟踪技术可以根据焊缝的规格下放杠杆好的焊接材料进行填充,保证焊缝美观且牢固,这也满足了电子设备行业高精度的要求。
智能自动焊接机器人可根据功能来进行分类,比如切割,焊接,搬运,喷涂,码垛等,还有就是它的臂展,负荷等。什么是焊接机器人?机器人焊接是使用机械化可编程工具(机器人),通过执行焊接和处理零件,完全自动化焊接过程。
到此,以上就是小编对于iic 全双工的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏