本篇目录:
PID控制器算法?
1、PID=Uk+KP*【E(k)-E(k-1)】+KI*E(k)+KD*【E(k)-2E(k-1)+E(k-2)】PID算法具体分两种:一种是位置式的 ,一种是增量式的。
2、PID算法具体分两种:一种是位置式的 ,一种是增量式的。位置式PID的输出与过去的所有状态有关,计算时要对e(每一次的控制误差)进行累加,这个计算量非常大,而明显没有必要。
-图1")
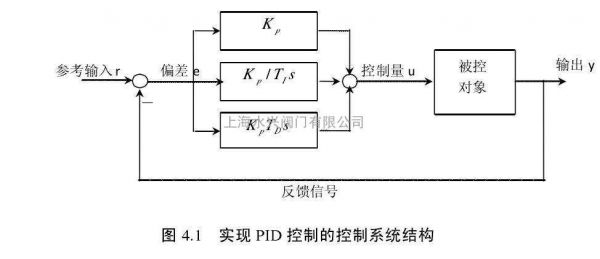
3、PID即:Proportional(比例)、Integral(积分)、Differential(微分)的缩写,PID控制算法是结合比例、积分和微分三种环节于一体的控制算法。
4、PID算法是工业应用中最广泛算法之一,在闭环系统的控制中,可自动对控制系统进行准确且迅速的校正。PID算法已经有100多年历史,在四轴飞行器,平衡小车、汽车定速巡航、温度控制器等场景均有应用。
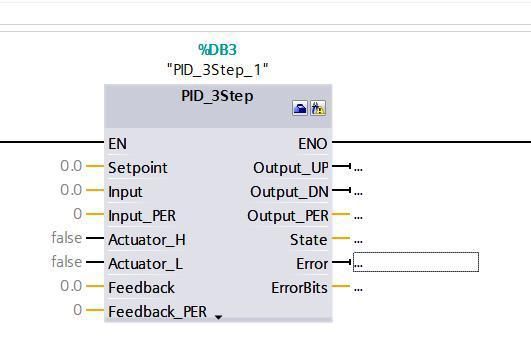
5、(2)数字PID增量型控制算法:执行机构需要的是控制量的增量(例如驱动步进电机)时,数字控制器的输出只是控制量的增量,该公式称为增量式PID控制算法。优点:①误动作时影响小,必要时可用逻辑判断的方法去掉出错数据。
-图2")
PID的计算公式
PID控制器的输出为:误差乘比例系数Kp+Ki*误差积分+Kd*误差微分。Kp*e + Ki*∫edt + Kd*(de/dt) (式中的t为时间,即对时间积分、微分)上式为三项求和。
PID增量式算法 离散化公式:△u(k)= u(k)- u(k-1)△u(k)=Kp[e(k)-e(k-1)]+Kie(k)+Kd[e(k)-2e(k-1)+e(k-2)]进一步可以改写成 △u(k)=Ae(k)-Be(k-1)+Ce(k-2)。
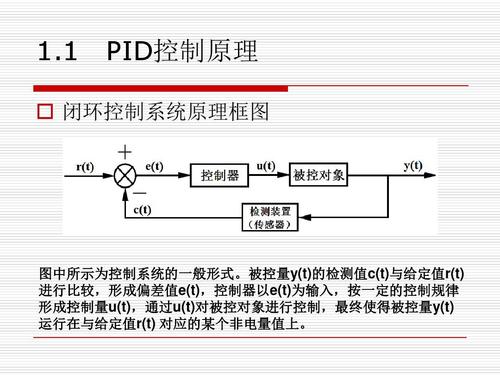
PID控制器由比例单元(P)、积分单元(I)和微分单元(D)组成。
-图3")
换句话说,通过增量PID算法,每次输出是PWM要增加多少或者减小多少,而不是PWM的实际值。所以明白增量式PID就行了。
相对余差=(设定值-实际值)/设定值。相对余差的计算方法如下:相对余差=(设定值-实际值)/设定值。其中,设定值是期望的控制目标,实际值是实际测量得到的控制量。
PID控制中,输出量的公式是什么?
1、积分控制是根据误差信号的积分值来调整控制输出量,以消除静态误差和提高稳态精度。积分控制的输出量与误差信号的积分值成正比,即输出量l=Ki*∫AEdt,其中Ki为积分系数。
2、PID控制器由比例单元(P)、积分单元(I)和微分单元(D)组成。
3、PID的增量型公式:PID=Uk+KP*【E(k)-E(k-1)】+KI*E(k)+KD*【E(k)-2E(k-1)+E(k-2)】PID算法具体分两种:一种是位置式的 ,一种是增量式的。
4、pid控制器由比例单元(p)、积分单元(i)和微分单元(d)组成。
位置式pid控制算法
PID=Uk+KP*【E(k)-E(k-1)】+KI*E(k)+KD*【E(k)-2E(k-1)+E(k-2)】PID算法具体分两种:一种是位置式的 ,一种是增量式的。
(1)增量型算法不需做累加,计算误差后产生的计算精度问题,对控制量的计算影响较小。位置型算法用到过去的误差的累加,容易产生较大的累加误差。(2)增量型算法得出的是控制的增量,不会影响系统的工作。
(1)数字PID位置型控制算法:由于计算机输出的u(k)可直接控制执行机构(如阀门),u(k)的值和执行机构的位置(如阀门开度)是一一对应的,因此通常称该公式为位置式PID控制算法。
控制点包含三种比较简单的PID控制算法,分别是:增量式算法,位置式算法,微分先行。 这三种PID算法虽然简单,但各有特点,基本上能满足一般控制的大多数要求。
pid控制温度选择哪个公式
和你说下在我们设备的一个经验值里,P=3,I=60,D=90,希望对你有所帮助。很多的控制也都是慢慢试验出来的pid 值。因为各种应用场合千差万别,不好根据公式计算出pid 值。
u(t) = e(t)*P SP——设定值 e(t)——误差值 y(t)——反馈值 u(t)——输出值 P——比例系数 滞后性不是很大的控制对象使用比例控制方式就可以满足控制要求,但很多被控对象中因为有滞后性。
PID控制器由比例单元(P)、积分单元(I)和微分单元(D)组成。
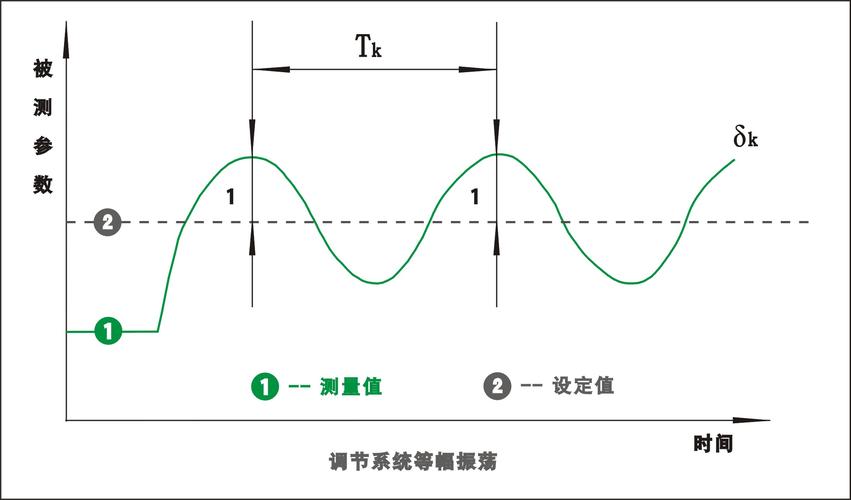
(1)首先预选择一个足够短的采样周期让系统工作。(2)仅加入比例控制环节,直到系统对输入的阶跃响应出现临界振荡,记下这时的比例放大系数和临界振荡周期。(3)在一定的控制度下通过公式计算得到PID控制器的参数。
最后公式:位置式:Uk=Kp*ek+Ki*(e1+e2+...+ek)+Kd*(ek-e(k-1))e:差值,比如加热中的设定-当前 ek:当前差值 e1,e..:第1,2。
到此,以上就是小编对于位置式pid计算公式的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏