本篇目录:
ROS基于SocketCAN的通信方式
1、ROS节点程序运行过程中需要获取机器人的传感器信息和发送控制指令,因此不可避免要与机器人进行通信,常见的通讯方式有串口、CAN和网口等,其中串口最为普遍。
2、计算机之间相互通信的时候,分为两种方式:一种是发送信息以后,可以确认信息是否到达,也就是有应答的方式,这种方式大多采用TCP协议;一种是发送以后就不管了,不去确认信息是否到达,这种方式大多采用UDP协议。
-图1")
3、ros:spinOnce(); // Handle ROS events r.sleep();} III. 最后说明一下将ROS集成到其他程序架构时的情况。有些图形处理程序会将main()包裹起来,此时就需要找到一个合理的位置调用ros:spinOnce()。
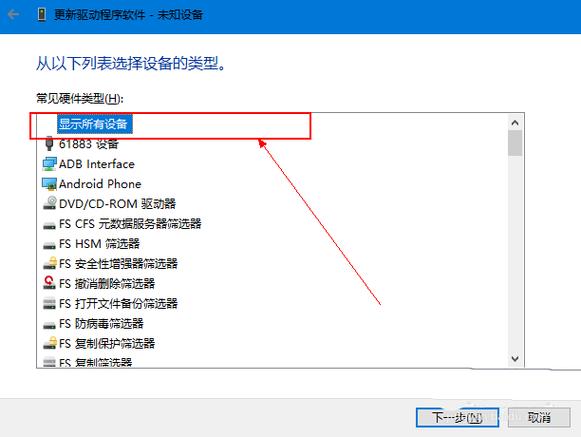
4、使用SocketCAN接口。SocketCAN是Linux内核的一个子系统,提供了一组用于与CAN总线通信的Socket接口。可以使用SocketCAN接口来监控CAN寄存器的变化。
5、话题通信的理论模型。话题通信是ROS中最常见通信方式之一,话题通信的实现是比较复杂的,但是话题通信的实现已经被ROS封装好了,只需要调用话题通信的接口就能实现轻松话题通信。
-图2")
CAN总线是什么?
CAN总线由CAN控制器、CAN收发器、数据传输线、数据传输终端等组成。CAN总线的特点:具有实时性强、传输距离较远、抗电磁干扰能力强、成本低等优点。采用双线串行通信方式,检错能力强,可在高噪声干扰环境中工作。
我们在了解汽车结构时常常接触到can总线这个名词,在工程实际中can总线是对汽车中标准的串行数据传输系统的习惯叫法。
CAN是控制器局域网络的简称,是国际上应用最广泛的现场总线之一。结构简单,只有2根线与外部相连,并且内部集成了错误探测和管理模块。基本概念:CAN是ISO国际标准化的串行通信协议。
-图3")
CAN是控制器局域网络的简称,是ISO国际标准化的串行通信协议。它的英文全称是Controller Area Network,一般简写为CAN。
CAN总线分为CAN高线和CAN低线,是由两条铜做的导线。它的作用就是将汽车仪表、变速箱、辅助刹车系统、ECU、控制模块、各种传感器等多个控制单元连接在一起,实现信息的实时同步。
CAN总线简介:CAN的英文全称是:Controller AreaNetwork,意思是区域网络控制器,最早是用于智能化住宅小区的信息传输,总线则源自计算机,因为其功能和计算机中的“BUS”类似。
命令汽车行驶的硬件
1、传动系统 传动系统一般由离合器、变速器、万向传动装置、主减速器、差速器和半轴等组成。其基本功用是将发动机发出的动力传给汽车的驱动车轮,产生驱动力,使汽车能在一定速度上行驶。
2、CBW(CommandBlock Wrapper,即命令块分组)是从USB HOST发送到设备的命令,命令的格式遵从接口中的bInterfaceSubClass所指定的命令块,这里为SCSI传输命令集。
3、执行器是由电子控制单元输出命令控制的装置,具体执行一定的控制功能。汽车电子控制系统在硬件结构上一般由传感器、电子控制单元和执行器三部分组成。
总线上的点对点技术是什么意思?工作原理是什么?
HyperTransport本质是一种为主板上的集成电路互连而设计的端到端总线技术,目的是加快芯片间的数据传输速度。
点对点(Point-to-Point)连接,并允许多个端口集中于单个控制器上,可以建立在主板(Mother Board)也可以另外添加。该技术建立在强大的并行 SCSI 通信技术基础上。
加之PCI Express采用8b/10b编码的内嵌时钟技术,时钟信息被直接写入数据流中,这比PCI总线更能有效地节省传输通道,提高传输效率。
CAN支持 多主方式工作 ,网络上任何节点均在 任意时刻主动 向其它节点发送信息,支持点对点、一点对多点和全局广播方式接收/发送数据。
相对于传统485,CAN总线通讯有什么优势?
而且,CAN具有的完善的通信协议可由CAN控制器芯片及其接口芯片来实现,从而大大降低系统开发难度,缩短了开发周期,这些是仅有电气协议的RS-485所无法比拟的。
具有实时性强、传输距离较远、抗电磁干扰能力强、成本低等优点。采用双线串行通信方式,检错能力强,可在高噪声干扰环境中工作。
CAN总线的数据传输速度非常的快,可以保证数据的实时性和可靠性 CAN总线还大大减少了汽车内总线的线束,从而达到降低故障发生的可能性。
到此,以上就是小编对于iso1179标准的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏